

J. Diego Caporale,
Ph.D.
Welcome, I am Diego Caporale.
I am a roboticist and controls engineer with a Ph.D. in Mechanical Engineering and Applied Mechanics from University of Pennsylvania, focusing in Robotic Controls, Legged Locomotion, and Dynamical Systems.
Few random things about me:
I was born and raised in Southern California, I enjoy racquetball, improv, and gaming, and my Peruvian/Argentinian heritage mean I’m always eating well.
Highlights

Projects
Terrain Stiffness and Risk Traversal Mapping
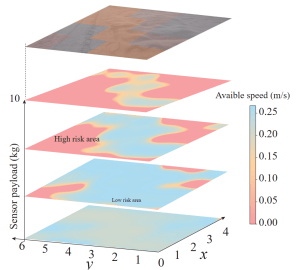
Using the proprioceptive capabilities of back-drivable robot legs, we are able to measure the terrain stiffness with every step. Using this measurements we can make terrain maps that can be used for geological discovery and/or combined with slipping/spin-out estimators to provide actionable risk traversal maps.
Proprioceptive Estimation of Terramechanics
Working with geomechanists and planetary scientists, we leverage the force measuring capability of the robot legs to measure terramechanical properties of the substrate with each step. We are able to detect the penetration resistance, crusty surfaces, and shear resistance, with aims to measure cohesion and moisture/ice content.
Do The “Twist”:
A Twisting Quad
Designed and built a 12+1 degree-of-freedom, robotic quadruped inspired by the Ghost Spirit 40 and MIT Mini-Cheetah. This robot is being used to test legged locomotion control methodologies and biomechanical hypotheses about the twisting spine.
Understanding Agility with a Twisting Spine
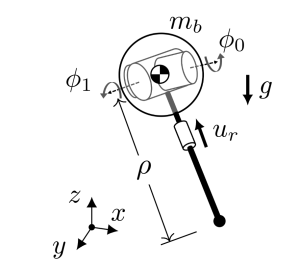
Most classical and MPC controllers focus on locomotion on a 2.5D surface, but for more dynamic parkour behaviors, we must move out off the sagittal and transverse planes. Inspired by squirrels bouncing off walls, this work used trajectory optimization to compute and compare the energetics twisting spines to rigid spines in a series of dynamic behaviors using Drake and DIRCON.
Robotic Control using Reduced-Order Dynamical Systems
Robotic control of dynamic monoped and quadruped robots using template-anchor framework, a vector field driven decomposition. Using these methods produced and analyzed transitional behaviors in several robots.
(DETAILS SOON)
Kod*Lab MJBots SDK
Built and maintained the open source Kod*Lab Mjbots SDK, a C++ library, simplifying setup and enabling high speed control of agile robots. The SDK included control loop, robot description, state estimation, communication (LCM), rigid-body kinematics and dynamics, control behaviors, simulation via mujoco, and hardware abstractions
About Me
Education

Ph.D., Mechanical Engineering and Applied Mechanics, 2024
—— University of Pennsylvania
M.S., Robotics, 2019
—— University of Pennsylvania
B.S., Mechanical Engineering, 2013
—— California Institute of Technology
Publications
Journal
[1] A. De, T. T. Topping, J. D. Caporale, and D. E. Koditschek, “Mode-Reactive Template-Based Control in Planar Legged Robots,” IEEE Access, vol. 10, pp. 16 010–16 027, 2022, doi: 10.1109/ACCESS.2022.3148921
[2] V. Vasilopoulos, G. Pavlakos, S. L. Bowman, J. D. Caporale, K. Daniilidis, G. J. Pappas, and D. E. Koditschek, “Reactive Semantic Planning in Unexplored Semantic Environments Using Deep Perceptual Feedback,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 4455–4462, Jul. 2020, doi: 10.1109/LRA.2020.3001496
Conferences
[3] J. D. Caporale, Z. Feng, S. Rozen-Levy, A. M. Carter, and D. E. Koditschek, “Twisting Spine or Rigid Torso: Exploring Quadrupedal Morphology via Trajectory Optimization,” in 2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023, p. 8
[4] W. Chen, S. Misra, J. D. Caporale, D. E. Koditschek, S. Yang, and C. R. Sung, “A Tendon-Driven Origami Hopper Triggered by Proprioceptive Contact Detection,” in 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), May 2020, pp. 373–380, doi: 10.1109/RoboSoft48309.2020.9116040
[5] J. D. Caporale, B. W. McInroe, C. Ning, T. Libby, R. J. Full, and D. E. Koditschek, “Coronal Plane Spine Twisting Composes Shape To Adjust the Energy Landscape for Grounded Reorientation,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 8052–8058, doi: 10.1109/ICRA40945.2020.9197026
Contact Me
For any questions use this form or find me on LinkedIn


